 |
MEDICAL ROBOTICS |
"Robotics at the Service of Healthcare"Eftychios Christoforou has a diploma in Mechanical Engineering from the National Technical Univ. of Athens, Greece (1994), and a postgraduate diploma in Management from the Mediterranean Inst. of Management, Cyprus (1996). He received his Ph.D. in Mechanical Engineering from the Univ. of Canterbury, New Zealand (2000). His doctoral studies were fully supported by a Commonwealth scholarship. He is currently an Associate Professor at the Univ. of Cyprus (UCY), Dept. of Mechanical and Manufacturing Engineering (2019-). He has extensive industrial experience on mechatronic/ robotic systems design, and system dynamics and control. He held a position as Adjunct Professor at Washington University in St. Louis, Dept. of Electrical and Systems Engineering, Missouri (2004-2007). During the same period, he was also a Research Fellow with the Medical School of the same university. Prior to his current appointment he was a visiting academic (teaching and research) at the University of Cyprus – School of Engineering (2007-2018). His research and teaching interests are in the areas of Robotics, Dynamics, Control, and Engineering Design. He has worked on several funded research projects. He is a Senior Member of the IEEE. He currently serves in the Editorial Board of The International Journal of Medical Robotics and Computer Assisted Surgery. He is the director of the UCY Robotics Laboratory at the University of Cyprus (www.robolab.ucy.ac.cy).
Associate Professor Eftychios Christoforou Director of UCY Robotics Laboratory Department of Mechanical and Manufacturing Engineering School of Engineering, University of Cyprus
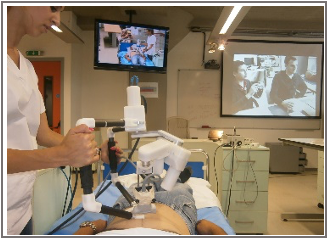
Telerobotic systems and Telemedicine
|
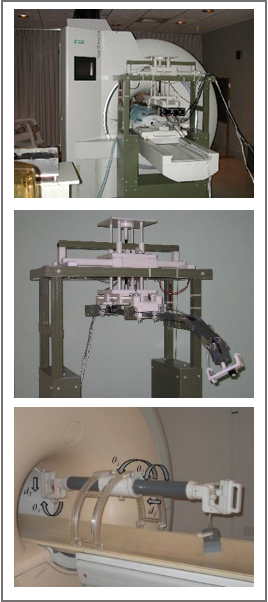
Image Guided Robotic Interventions and MR-Compatible Robots"Robotic interventions are an integral part of clinical practice"Research focuses on robotically assisted, image-guided minimally invasive interventions. Prototype MR-compatible robotic systems were developed, to provide access to a patient inside an MRI scanner, and perform diagnostic and therapeutic interventions. Design and control challenges are related to the strong magnetic fields and the limited accessibility to the patient inside the scanner. Stereotactic control as well as real-time image-guidance approaches were considered, and computer based preoperative planning tools were developed. Achievements include a novel real-time robot control approach, with effective integration with the scanner. Extensive phantom and in-vivo animal studies were performed simulating clinical applications such as image-guided biopsies and drug delivery.
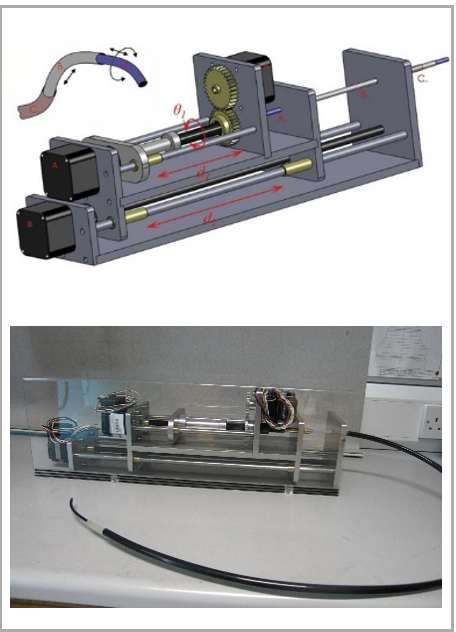
Medical Robots Design and Prototyping"Custom robot designs are required for specific medical applications"Medical robotic systems are custom designs that meet special clinical requirements. Various robot designs, actuation and sensing devices were developed and examined in our lab, including MR-compatible robotic systems. Among them are continuum robots, which have attracted considerable attention for their role in minimally invasive diagnostic and therapeutic interventions. They include minimally invasive surgery (MIS) performed through small incisions on the body or natural orifices transluminal endoscopic surgery (NOTES). The latter systems use natural body orifices (e.g., mouth, nostrils, vagina, urethra, rectum) as entry points for the surgical instruments to access internal organs. A 3-DOF concentric tubes continuum system has been designed and tested in our lab. It is composed of two distinct parts. First, is the concentric tubes assembly which constitutes the mechanism part, i.e. the actual tool which can be installed in application-dependent manner. Second is the actuation module, which is located at the proximal end of the robot. The result of the developed robot system is a highly versatile controlled actuation module, for which all available motions can be independently controlled, effectively simplifying its usage.
|
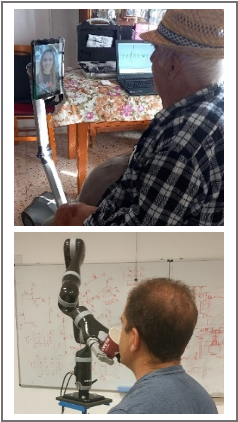
Nursing and Assistive Robotic Technologies"Robotic systems undertake nursing duties and support aging-in-place"Research on service robotics focuses on nursing robots used as supplemental healthcare workers to undertake physical tasks concerning logistics, such as the delivery of food trays, medical waste collection, and linen distribution. Also, nursing robots can be assigned routine clinical tasks including measuring patients’ vital signs. Remotely controlled and/or autonomous robots can handle interactive caregiver duties and serve as interfaces for doctors and/or nurses to communicate with patients and/or elderly over distance. Assistive robots are also expected to play a crucial role for aging-in-place, allowing elderly to age at home with disabilities and chronic diseases, to pursue independent and productive lives. Our relevant research areas include autonomous navigation in indoor spaces, which is challenging given standard floor layouts in healthcare facilities that hinder robot free-space location and navigating tight corners and largely occluded areas. Other research topics include the integration with health information systems for access to electronic health records (EHR) workflows, and hands-free access to a patient’s contextual medical history, including supporting clinical decision making. Research is also performed on wearable robot systems to encourage supporting elderly patients to maintain a healthy lifestyle and prevent noncommunicable diseases. A novel robotic portable system was developed in this direction where exoskeleton assisted squatting, walking, or balance exercises in the home can be remotely monitored by assistive robots or through avatars. Other research topics are the development and deployment of robots for independent living and aging-in-place, such as automated feeding devices.
UCY Robotics Lab"In our lab we study, design, build, and test Robots"The UCY Robotics Lab is a research laboratory within the Department of Mechanical and Manufacturing Engineering (MME) at the University of Cyprus. The team comprises postdoctoral fellows, PhD and master’s students as well as undergraduate research assistants (diploma thesis students). An extensive network of local and international collaborators is our basis for working on multidisciplinary projects. Activity focuses on the dynamic analysis, control, design and development of robotic systems. Research includes both theoretical as well as experimental investigations and concerns robotic manipulation and autonomous mobile robots. It extends to various applications of medical robotics, image-guided interventions, telerobotics and telemedicine, nursing robotics, elderly care and assistive living technologies, industrial production, reconfigurable and adaptive mechanisms. Equipment at the UCY Robotics Lab includes both research and industrial robotic manipulators, mobile robotic platforms, as well as general equipment used for the design, development and testing of robot prototypes. Facilities and technical support within the MME Department are available, including access to a fully equipped machine shop and electronics workshop (CNC lathes, milling machines, 3D printers, etc).
|
|
SELECTED PUBLICATIONS1. J.D. Velazco-Garcia, N.V. Navkar, S. Balakrishnan, G. Younes, J. Abi-Nahed, K. Al-Rumaihi, A. Darweesh, M.S.M. Elakkad, A. Al-Ansari, E.G. Christoforou, M. Karkoub, E.L. Leiss, P. Tsiamyrtzis, N.V. Tsekos. Evaluation of how Users Interface with Holographic Augmented Reality Surgical Scenes: Interactive Planning MRI-Guided Prostate Biopsies. The International Journal of Medical Robotics and Computer Assisted Surgery (Wiley), 17(5), 1-13, 2021. 2. E.G. Christoforou, S. Avgousti, N. Ramdani, C. Novales, A.S. Panayides. The Upcoming Role for Nursing and Assistive Robotics: Opportunities and Challenges Ahead, Frontiers in Digital Health, 2, 2020. 3. A.K Knutsen, A.D. Gomez, M. Gangollia, W.-T. Wang, D. Chan, Y.-C. Lud, E. Christoforou, J.L. Prince, P.V. Bayly, J.A. Butman, D.L. Pham. In vivo estimates of axonal stretch and 3D brain deformation during mild head impact. Brain Multiphysics (Elsevier), 1, 100015, 2020. 4. S. Avgousti, E.G. Christoforou, A.S. Panayides, S. Voskarides, C. Novales, C.S. Pattichis, P. Vieyres. Medical Telerobotic Systems: Current Status and Future Trends. BioMedical Engineering Online (Springer), 15(96), 2016. 5. E.G. Christoforou, I. Seimenis, E. Andreou, E. Eracleous, N.V. Tsekos. A novel general-purpose MR-compatible manually-actuated robotic manipulation system for minimally-invasive interventions under direct MRI guidance. The International Journal of Medical Robotics and Computer Assisted Surgery (Wiley), 10(1), 22-34, 2014.
|